Hi! I'm Pang.
My research aims to enable robots to confidently and intelligently make contacts.
About Me

I’m Tao Pang, a roboticist at the Robotics and AI Institute (formerly Boston Dynamics AI Institute). I’m interested in enabling robots to intelligently and dexterously manipulate objects and their surroundings through contact-rich interactions.
My research focuses on two areas: (i) efficient global planning for contact-rich manipulation by leveraging the structure of contact models, and (ii) Reinforcement Learning (RL) and Behavior Cloning (BC) guided by planner-generated data.
More broadly, I believe model-based reasoning is crucial not only for efficiently generating the large-scale data needed by robotics foundation models today, but also for developing future algorithms that help robots learn from experience and ultimately go beyond human performance.
CV | Google Scholar | Github | Youtube | LinkedIn
Research
Planning for Contact-rich Manipulation
Combining smoothing, quasi-dynamic contact models and classical motion planning methods, we can power through local minima and the exponential explosion of contact modes, and generate complex contact-rich manipulation policies within minutes on a MacBook Pro using just the CPU (video: reaching a goal with our policy on hardware).
Approximately Optimal Global Planning for Contact-Rich SE(2) Manipulation on a Graph of Reachable Sets, in submission, 2026. [pdf]
S. Liu*, T. Zhao*, B.P. Graesdal, P. Werner, J. Wang, J. Dolan, C. Liu, T. Pang.- Dexterous Contact-Rich Manipulation via the Contact Trust Region, in the International Journal of Robotics Research (IJRR), 2025. Recipient of the Inaugural IJRR Best Paper of the Season Award (Q2 2025). [website]
H.J.T. Suh*, T. Pang*, T. Zhao, R. Tedrake. - Global Planning for Contact-Rich Manipulation via Local Smoothing of Quasi-dynamic Contact Models, in IEEE Transactions on Robotics (T-RO), 2023. Honorable Mention for the IEEE TR-O King-Sun Fu Memorial Best Paper Award. [pdf][website][MIT News]
T. Pang*, H.J.T. Suh*, L. Yang, R. Tedrake. - Bundled gradients through contact via randomized smoothing, in IEEE Robotics and Automation Letters (RA-L), 2022. [pdf][video]
H.J.T. Suh*, T. Pang*, R. Tedrake.
Planning-Guided Behavior Cloning
Planning offers a powerful alternative data source for contact-rich manipulation tasks, for which collecting data through teleoperation is challenging (video: a state-based diffusion policy trained entirely from synthetic data running on hardware).
- Should We Learn Contact-Rich Manipulation Policies from Sampling-Based Planners?, in IEEE Robotics and Automation Letters (RA-L), 2025. [pdf][video]
H. Zhu, T. Zhao, X. Ni, J. Wang, K. Fang, L. Righetti, T. Pang. - Physics-Driven Data Generation for Contact-Rich Manipulation via Trajectory Optimization, in RSS2025. [pdf][website]
L. Yang, H.J.T. Suh*, T.Zhao*, B. Graesdal, T. Kelestemur, J. Wang, T. Pang, R. Tedrake. - Planning-Guided Diffusion Policy Learning for Generalizable Contact-Rich Bimanual Manipulation, in ICRA2026. [pdf][website]
X. Li, T. Zhao, X. Zhu, J. Wang, T. Pang, K. Fang.
Quasi-static Rigid Body Dynamics
Rigid body systems are close to force equilibrium for many robotic manipulation tasks (e.g. the one on the right). This assumption allows simulating such systems with much larger time steps, as indicated by the choppiness in the video, than using second-order dynamics. Therefore, quasi-static models are more amenable for planning, as the planner can look further into the future while taking fewer steps.
Contact Force Estimation & Control from Joint Torque
Whole-body contact force estimation using only joint-torque measurements has severe limitations. Nevertheless, under the right circumstances, they can keep both the robot and the environment safe when accidental collision happens. As shown on the right, the robot bumped into an egg, but did not crush it!
- Easing reliance on collision-free planning with contact-aware control, in ICRA2022. [pdf][video]
T. Pang, R. Tedrake. - Identifying external contacts from joint torque measurements on serial robotic arms and its limitations, in ICRA2021. [pdf][video]
T. Pang, J. Umenberger, R. Tedrake.
Gasoline Variable-pitch Quadcopter
A strange creation that weighs 10 kg and can remain airborne for up to 3 hours by burning fossil fuel. It was built at a time when electric quadcopters were getting popular due to their mechanical simplicity, but could only fly for less than 30 minutes. Not any more.
Projects
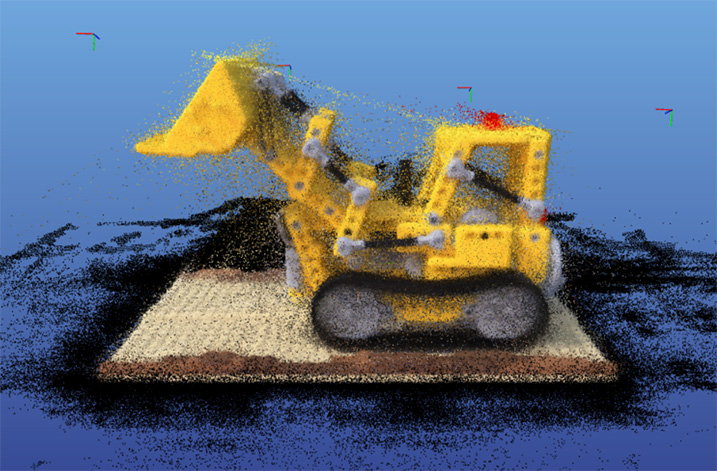
3D Geometry Reconstruction from NeRF
Class project of MIT 6.869. I observed that in order for NeRF to accurately learn the object geometry, color needs to be a function of both spatial position and viewing direction.

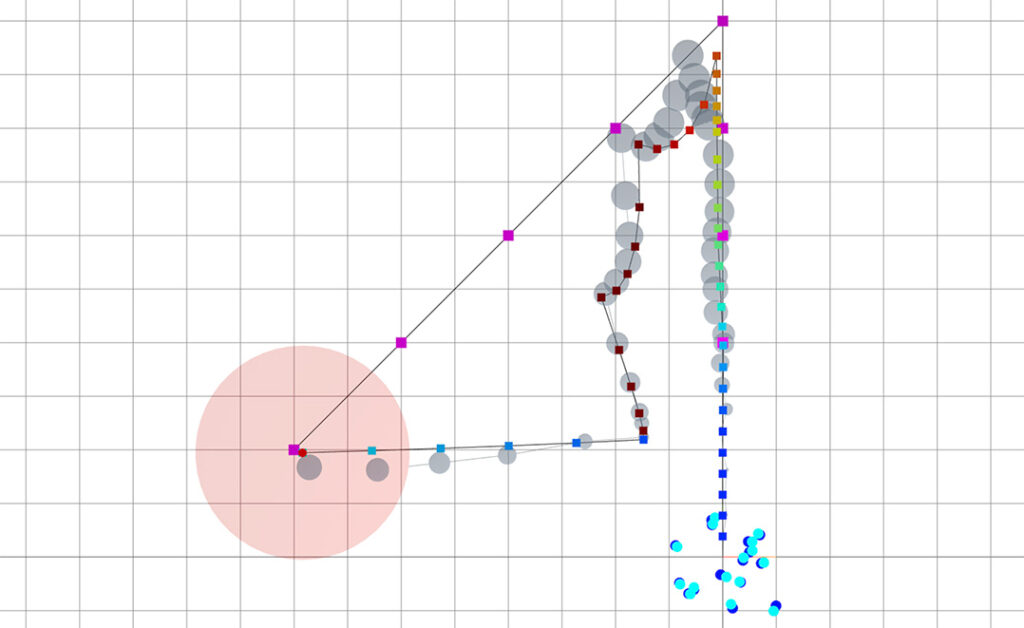
Active SLAM for a Planar Robot
Class project of MIT 16.485, where I implemented a path planner that actively seeks to reduce pose uncertainty by returning to observed landmarks, in addition to SLAM with loop-closure.